As global temperatures continue to rise, scientists at National Central University (NCU) have uncovered a key molecular mechanism that enables plants to survive heat stress. A research team led by Professor Shaw-Jye Wu and Dr. Jia-Rong Wu from NCU’s Department of Life Sciences discovered that the nuclear E3 ubiquitin ligase PUB49 works together with the heat tolerance protein HIT4 to regulate heat-induced chromatin remodeling, a process essential for plant thermotolerance. Their findings were published in the international journal Journal of Experimental Botany.
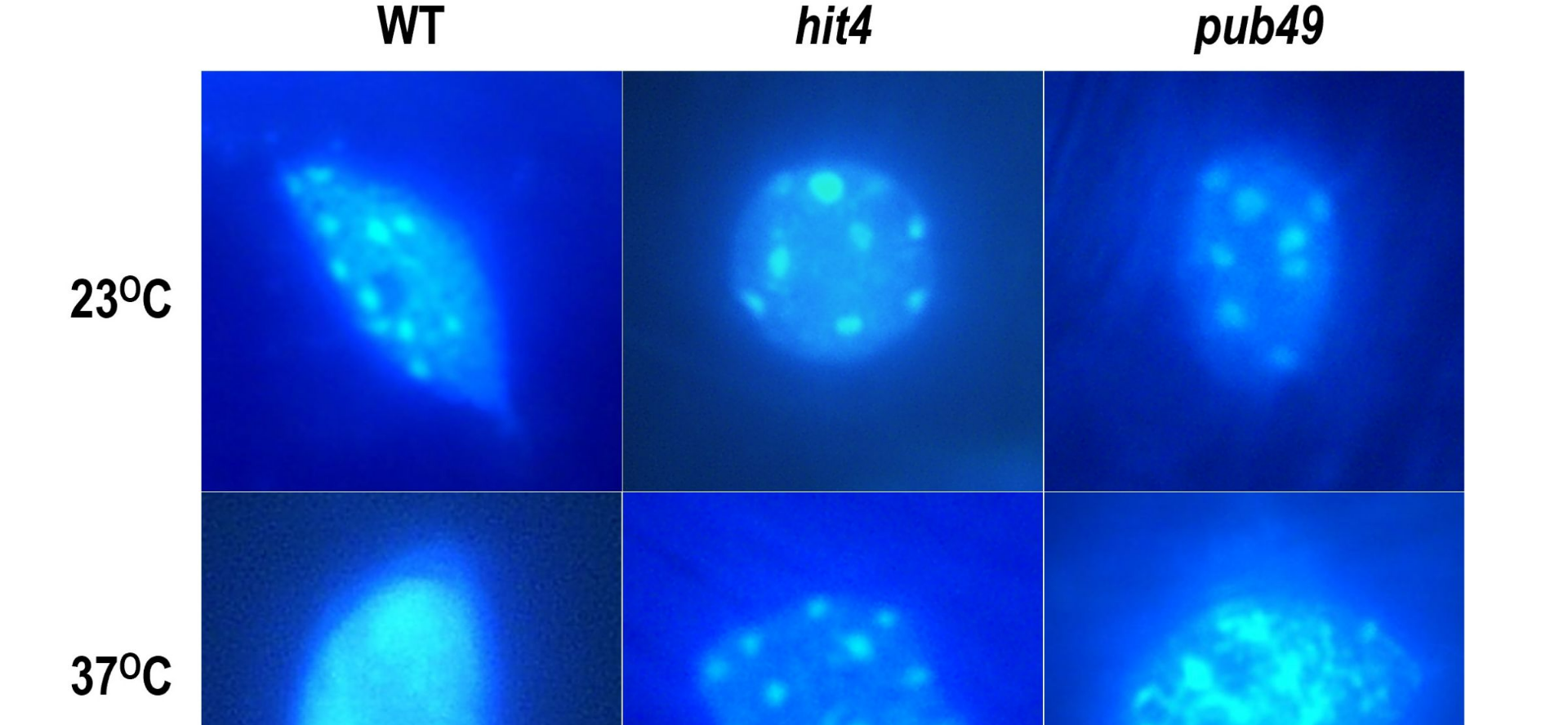
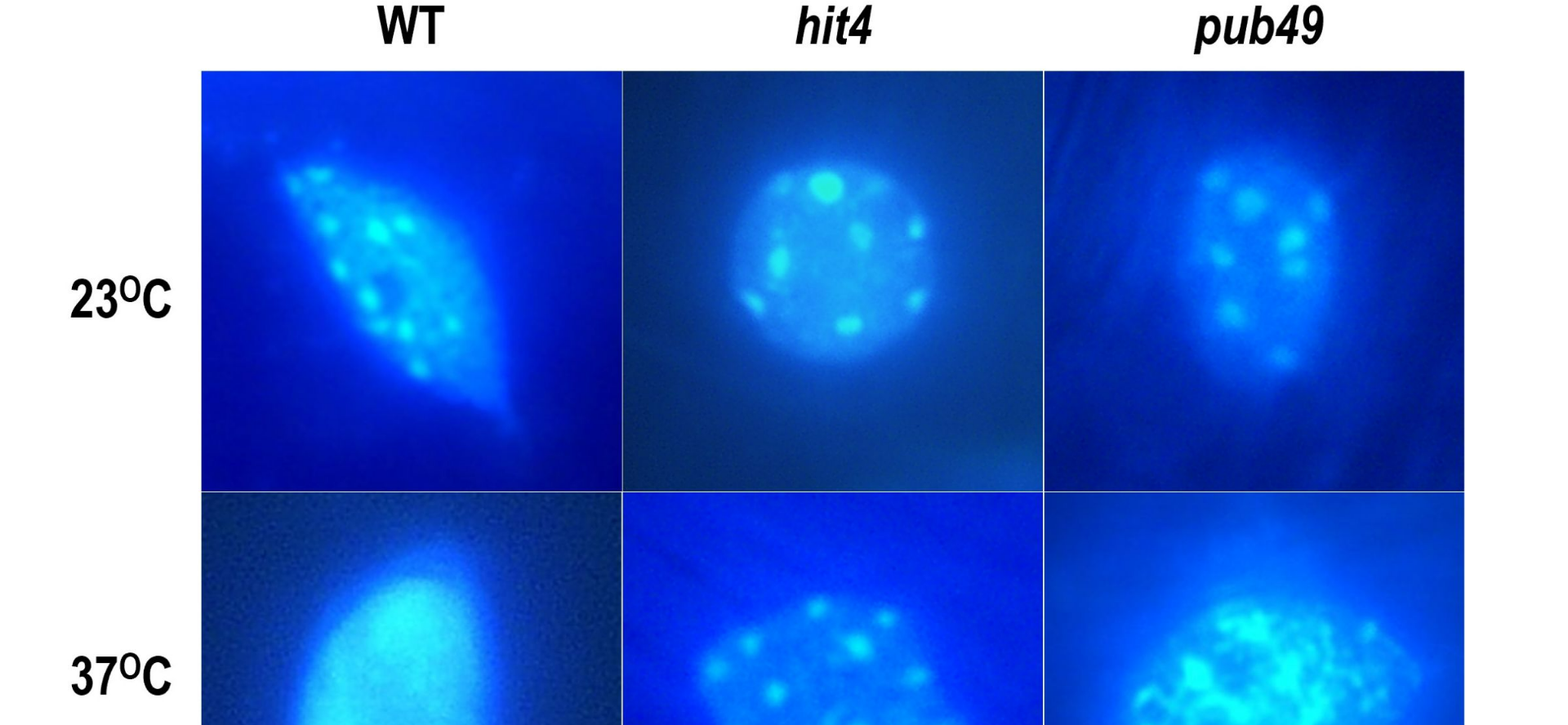
Unlike previous studies that focused mainly on heat shock proteins (HSPs), the NCU team screened more than 100,000 Arabidopsis thaliana seeds using a forward genetics approach to identify genes responsible for heat tolerance. The study revealed that PUB49 physically interacts with HIT4 and is indispensable for the chromatin reorganization required to activate plant heat responses.
The research marks the first demonstration that PUB49, a nuclear U-box E3 ubiquitin ligase, directly participates in heat-induced chromocenter decondensation. By establishing a molecular link between ubiquitination, chromatin remodeling, and thermotolerance, the study opens a new avenue for understanding how plants adapt to extreme temperatures.
Professor Wu said that as climate change intensifies, heat stress has become a major threat to agricultural productivity and global food security. The discovery not only advances fundamental knowledge of plant heat adaptation but also provides a promising molecular target for developing heat-tolerant crops, helping strengthen agricultural resilience in a warming world.