Editorial Team
Published on 18 June 2021




By mimicking human skin, new kinds of tactile sensor technologies created at the City University of Hong Kong (CityU) offer hope to improving the quality of life for people suffering serious injuries and disabilities.
These breakthrough technologies, developed through two research projects co-led by CityU, are so sophisticated that they enable a robotic appendage to behave like a human hand and complete such tasks as threading a needle or grasping a fragile piece of tofu without spillage.
In the first project, Dr Shen Yajing, Associate Professor in CityU’s Department of Biomedical Engineering, has co-led joint research with the University of Hong Kong on developing a new kind of soft sensor with skin-comparable characteristics.
The research, published in Science Robotics under the title “Soft magnetic skin for super-resolution tactile sensing with force self-decoupling”, promises to advance areas such as the development of smart prosthetics and human–robot interaction.
The sensor is located in a multi-layered structure modelled on human skin. A very special feature is that the sensor can “decouple”, or decompose, the external force automatically into two components, providing an accurate measurement of these two forces respectively in order to analyse or control the stationary or moving state of an object.
Moreover, tactile “super-resolution” allows the sensor to accurately locate the stimuli’s position. “Our efficient tactile super-resolution algorithm uses deep learning and has achieved a 60-fold improvement in the localisation accuracy of the contact position, which is the best among super-resolution methods reported so far,” said Dr Shen.
“To the best of our knowledge, this is the first tactile sensor that has achieved self-decoupling and super-resolution abilities simultaneously,” he added.
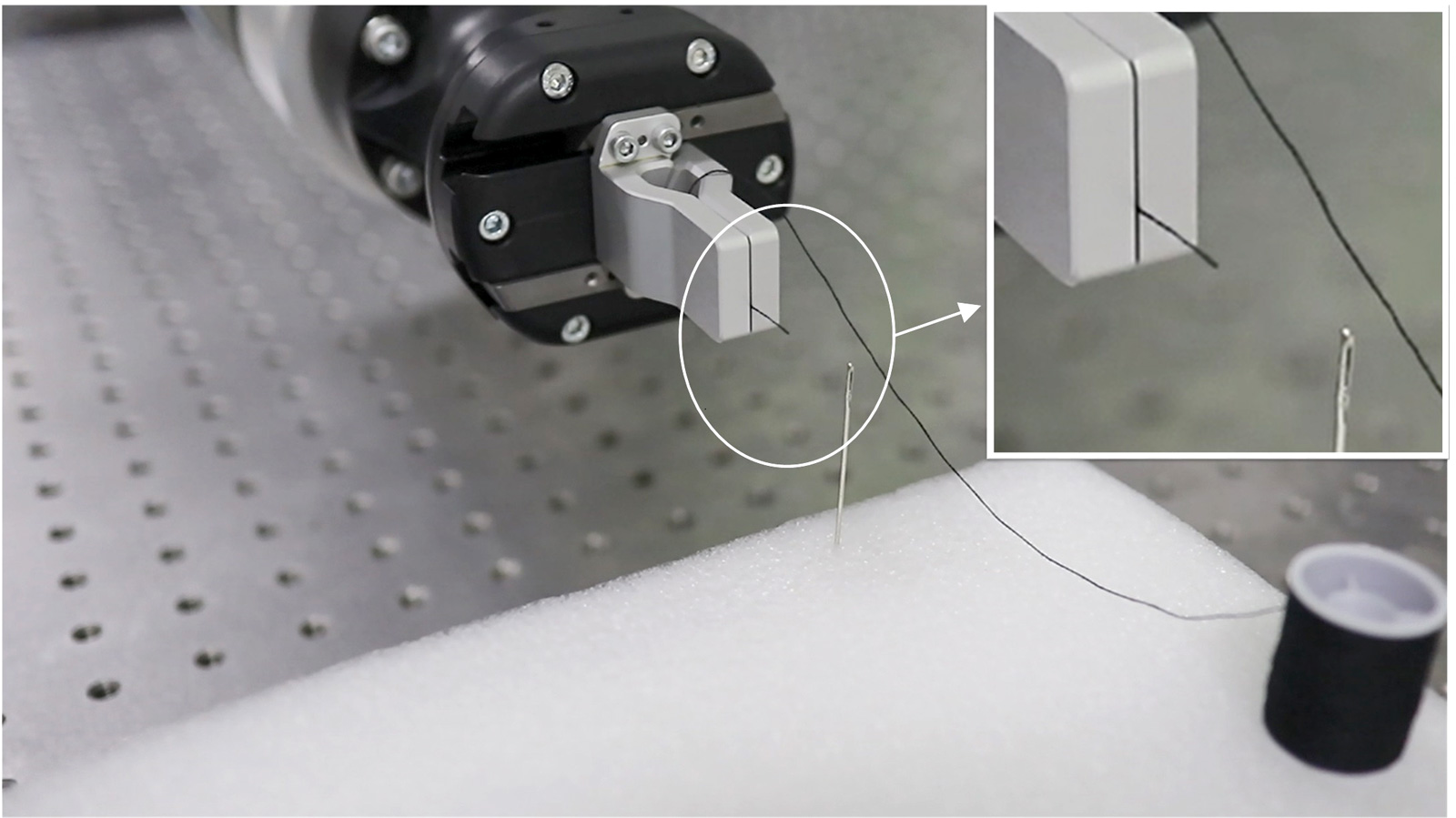
By mounting the sensor at the fingertips of a robotic gripper, the team has demonstrated that robots can accomplish challenging tasks. For example, the robotic gripper can grasp fragile objects like an egg with a high degree of stability while an external force is trying to drag it away, and it can thread a needle via teleoperation.
“This proposed sensor can help develop adaptive grasping, dexterous manipulation, texture recognition, smart prosthetics and human–robot interaction. The advance of soft artificial tactile sensors with skin-comparable characteristics can make domestic robots a future reality in our daily life,” Dr Shen added.
Inspired by the delicate structure of human skin, the second research project, this time co-led by Dr Yang Zhengbao, Assistant Professor in the Department of Mechanical Engineering, has created a highly sensitive tactile sensor array that has the potential to restore touch and sensation, as well as monitor health.
Consisting of protective layers, an insulative layer and two piezo sensory layers, the dual-layer comb piezoelectric tactile sensor array that the team fabricated can measure more spatiotemporal information than similar technologies. Furthermore, the team invented the “row+column” electrode structure that can reduce fabrication costs significantly.
“The system can achieve real-time detection and differentiation of diverse external stimuli such as bending, tension and compression within one sensor element. Our sensor can respond extremely fast, with a response time down to 10 milliseconds, which is even faster than human skin,” Dr Yang explained.
The tactile sensor is so delicate that it can even grasp a fragile piece of tofu without breakage, showing great potential for the human–machine interface and promoting the development of smarter prosthetics, robotic hands, and equipment for handling multiple soft and fragile products in industry.
The system is a promising candidate for reconstructing the human tactile system, i.e. re-establishing tactile sensation for people with skin damage and assisting amputees. The sensor can also help monitor overall human health, for example by accurately detecting weak artery pulses.
The team’s findings have been published in Advanced Science under the title “Skin-inspired piezoelectric tactile sensor array with crosstalk-free row+column electrodes for spatiotemporally distinguishing diverse stimuli”.